6 DOF Hexapod
Our robots with 6 degrees of freedom
6 dof motion platform
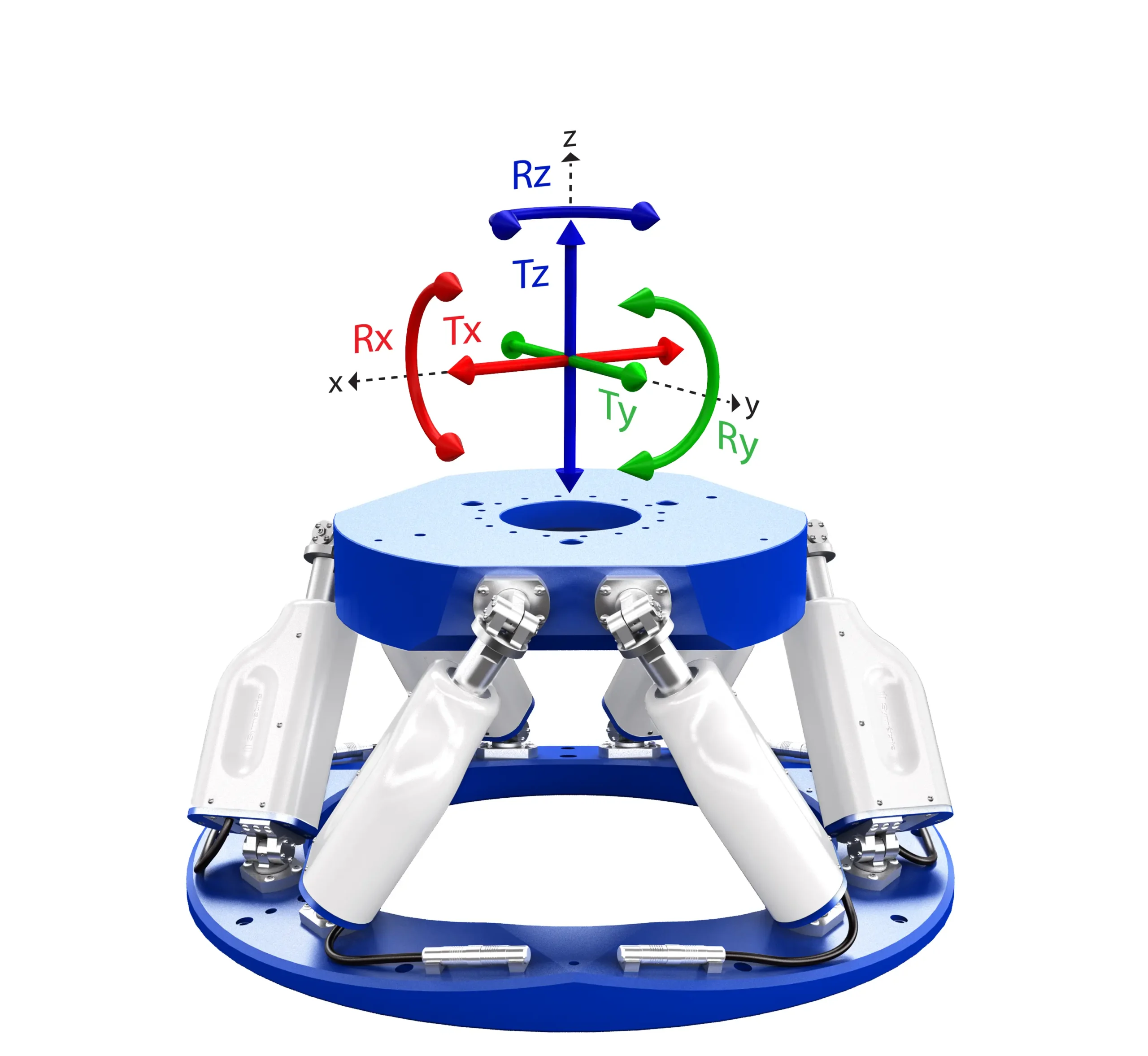
A 6 DOF hexapod is a parallel kinematic structure consisting of a mobile platform connected to a fixed platform with 6 linear actuators acting in a synchronized manner.
This design allows an object placed on the mobile platform to be moved along 6 axes. In other words, the hexapod can move an object according to the 3 translations (Tx, Ty, Tz) and the 3 rotations (Rx, Ry, Rz); all combinations are possible.
This technology, derived from mechatronics, is particularly suited to applications requiring fine, complex positioning along several axes positioned in any reference frame. This means that an object placed on the mobile platform can be positioned, adjusted, and assembled easily and simply.



they chose Symétrie’s 6DOF hexapods



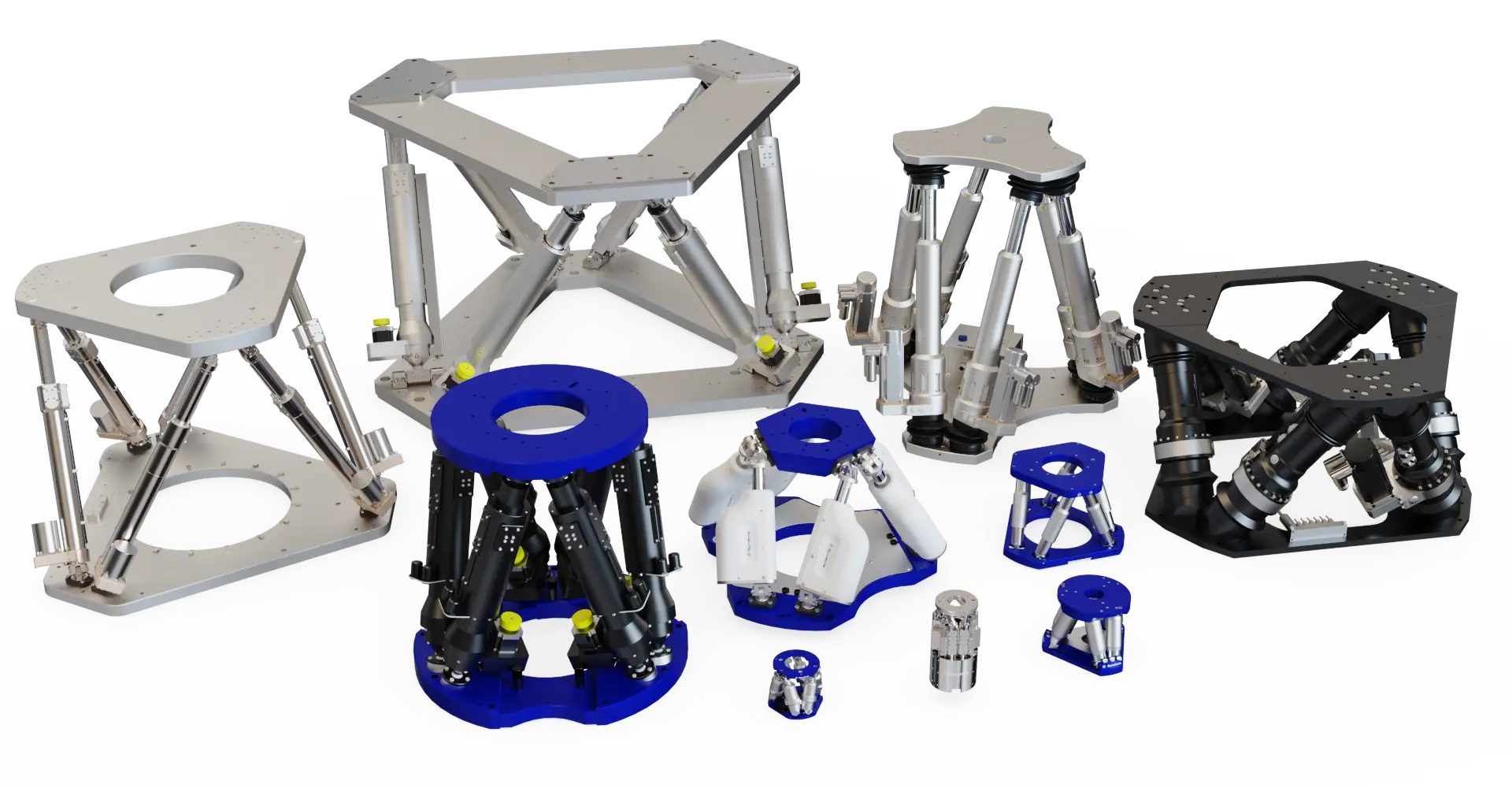
Discover our wide range of precision positioning hexapods stages for loads from a few grams to several tons and resolutions from 10 nm to a few tenths of a micron.

We help you succeed in your dynamic motion projects, allowing you to test objects weighing from a few kg to several tons with up to 2m/s speed and 1g acceleration.
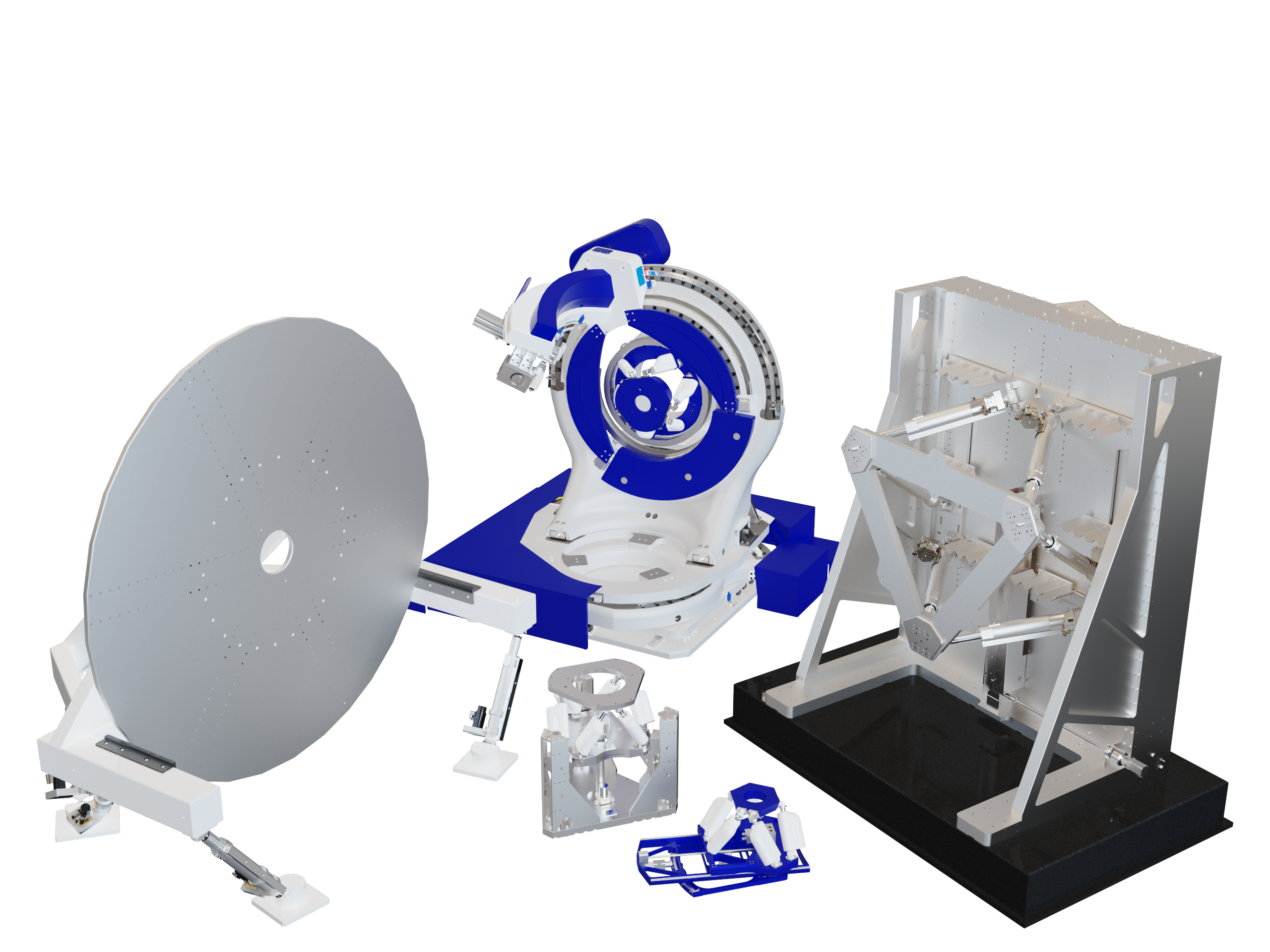
From the feasibility study to maintenance, Symetrie uses its skills in metrology, dynamics and positioning to offer you the best solutions, adapted to your constraints.
they chose Symétrie hexapods

Contact an expert :
Submit a form and receive a quick response by e-mail or telephone from one of our sales engineers.