




Conception et réalisation
Des prestation de haute précision
Symétrie conçoit, réalise et installe des systèmes de positionnement et de mise en mouvement dynamique.



Pour vous garantir la fiabilité et la qualité de nos réalisations, nous disposons des moyens suivants :
CONCEPTION MÉCANIQUE
■ Solidworks pour la conception mécanique, avec module de calcul d’éléments finis
■ SYM_Hexa, logiciel développé en interne pour la conception d’hexapodes
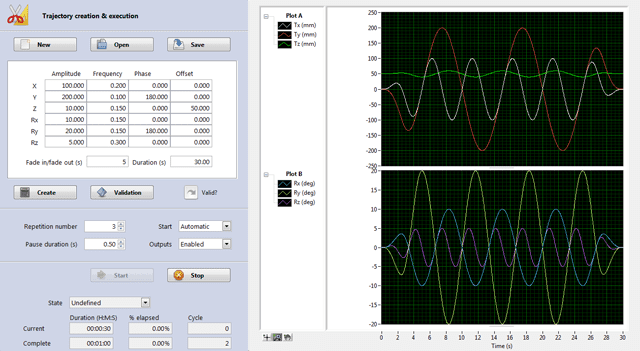
CONCEPTION LOGICIELLE
■ LabView et Qt pour la réalisation de les interfaces graphique utilisateur SYM_Positioning et SYM_Motion
■ LabView, C, C++, C#, EPICS, TANGO, Java, Python, MATLAB, Profibus… pour contrôler un hexapode de positionnement via une interface de votre choix avec l’option API (Application Programming Interface)








{kind=link}
{kind=link}
{kind=link}