L’Hexapode
Qu’est-ce qu’un hexapode ?
DÉFINITION
L’hexapode est un système mécatronique à structure parallèle de haute précision qui permet le positionnement et le mouvement d’objets dans l’espace suivant les six degrés de liberté (translation X, Y, Z et rotation Rx, Ry, Rz). Cette plateforme hexapode, également appelée plateforme de Stewart ou robot parallèle, offre une rigidité exceptionnelle et une précision nanométrique grâce à sa conception à six vérins actionneurs. Les systèmes hexapodes sont utilisés dans des applications industrielles et scientifiques exigeantes telles que l’alignement optique, la simulation de mouvement, l’astronomie et la métrologie de précision.
HISTOIRE EN BREF

Dans les années 1800, Augustin Louis Cauchy, pionnier de l’analyse mathématique, étudie la raideur d’un « octaèdre articulé », considéré comme l’ancêtre théorique de l’hexapode moderne.
En 1949, V. Eric Gough, ingénieur chez Dunlop en Angleterre, construit le premier mécanisme parallèle pratique pour tester des pneus sous différentes charges. En 1965, D. Stewart utilise une variante de ce système pour des simulateurs de vol.
Le robot sera alors renommé « plateforme de Stewart », bien que l’appellation « plateforme de Gough-Stewart » soit plus juste historiquement. Au fil des décennies, l’hexapode a été perfectionné par de nombreux ingénieurs et chercheurs (Klaus Cappel, H. McCallion, etc.), évoluant vers les systèmes de haute précision que nous connaissons aujourd’hui.
HEXAPODE VS BRAS ROBOTISÉ
Souvent comparés dans les milieux industriels, ces deux solutions de positionnement ont cependant de nombreuses différences et répondent à des besoins précis.
| Critère | Hexapode | Robot sériel |
| Degrés de liberté | 6 DDL simultanés (Tx, Ty, Tz, Rx, Ry, Rz) | Axes empilés indépendants |
| Rigidité | Très élevée (structure fermée) | Plus faible (axes superposés) |
| Encombrement | Compact et intégré (axes superposés) | Plus volumineux (axes empilés) |
| Précision | Excellente répétabilité | Cumul d'erreurs des axes |
| Cinématique | Parallèle | Sérielle |
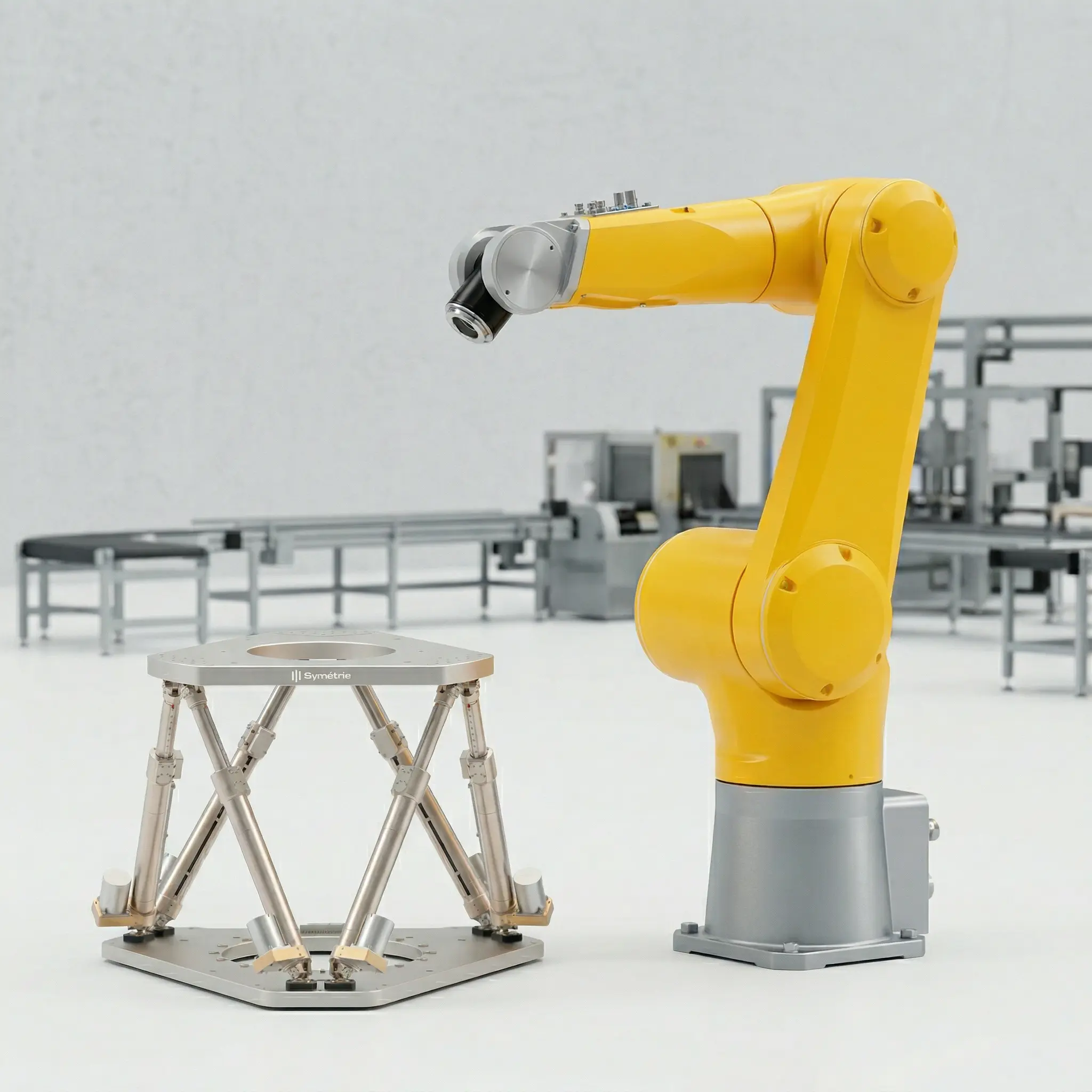
HEXAPODE & BRAS ROBOTISÉ: UNE ARCHITECTURE HYBRIDE

Associer un bras robotisé à un hexapode permet de combiner le meilleur des deux mondes : la portée et la vitesse du robot série avec la précision et la rigidité du mécanisme parallèle.
Le bras assure le positionnement global rapide tandis que l’hexapode effectue les ajustements micrométriques et les corrections d’orientation en temps réel. Cette complémentarité cinématique ouvre la voie à des applications à haute valeur ajoutée : usinage de précision, calibration d’optique, assemblage haute tolérance, polissage adaptatif, ou inspection automatisée.
Grâce à cette architecture hybride, la cellule robotique gagne en précision, flexibilité et réactivité, tout en réduisant les temps de calibration et en augmentant la qualité du processus.
HEXAPODE VS PLATINES
Deux approches pour le positionnement multi-axes : la cinématique parallèle de l’hexapode face à l’empilement d’axes de translation et rotation classiques.
| Critère | Hexapode | Tables translations/rotations |
| Architecture | Cinématique parallèle (6 actionneurs simultanés) | Axes superposés (X, Y, Z, Rx, Ry, Rz) |
| Encombrement | Compact, centre de gravité bas | Volumineux (accumulation des axes) |
| Rigidité dynamique | Excellente (structure fermée) | Dégradée par l'empilement |
| Charge utile | Répartie sur 6 actionneurs | Supportée par l'axe inférieur |
| Précision de pose | Mouvements couplés, pas d'accumulation d'erreur | Erreurs cumulatives des axes |
| Temps de réponse | Rapide (6 DDL simultanés) | Séquentiel ou synchronisé |
| Complexité de contrôle | Cinématique inverse en temps réel | Contrôle direct par axe |
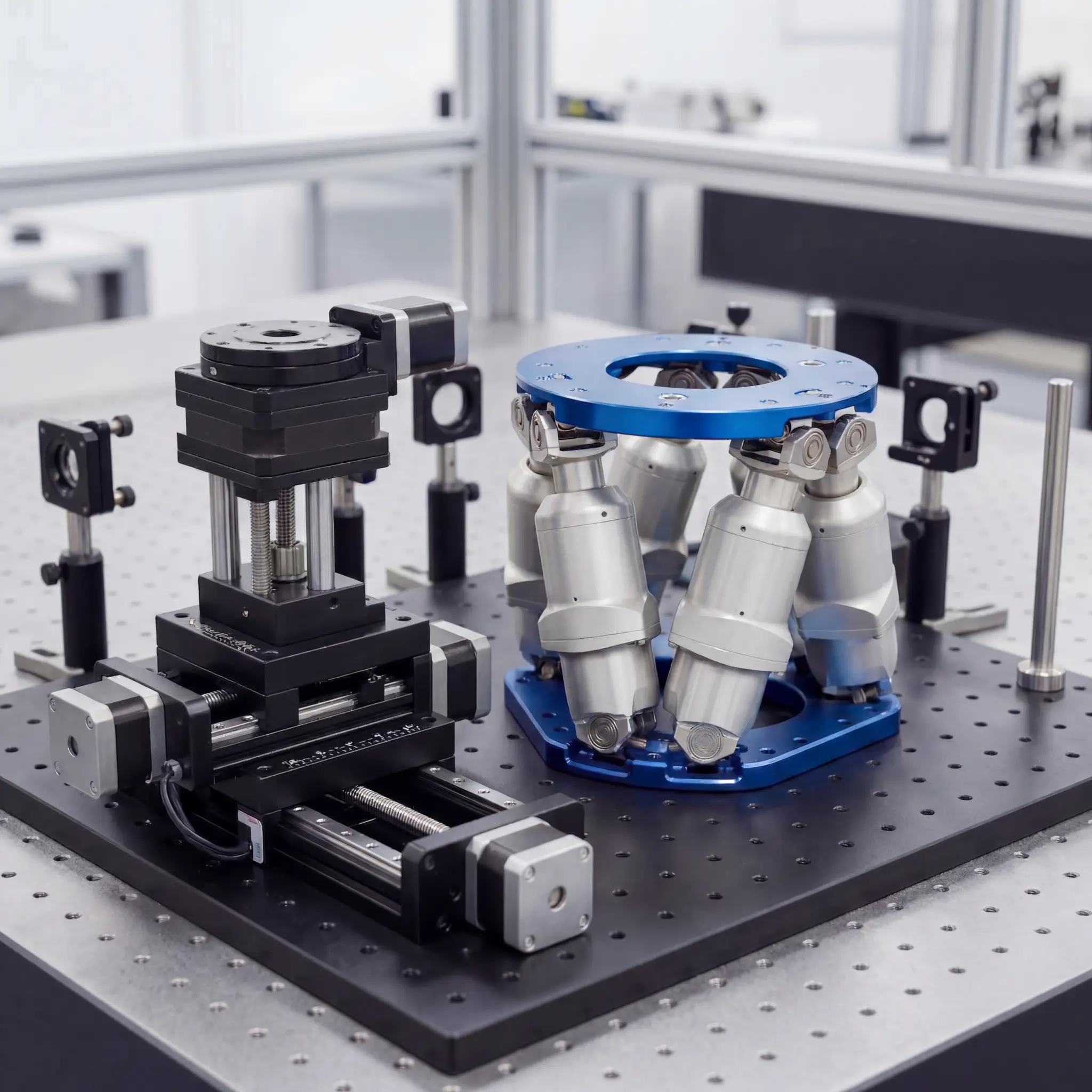
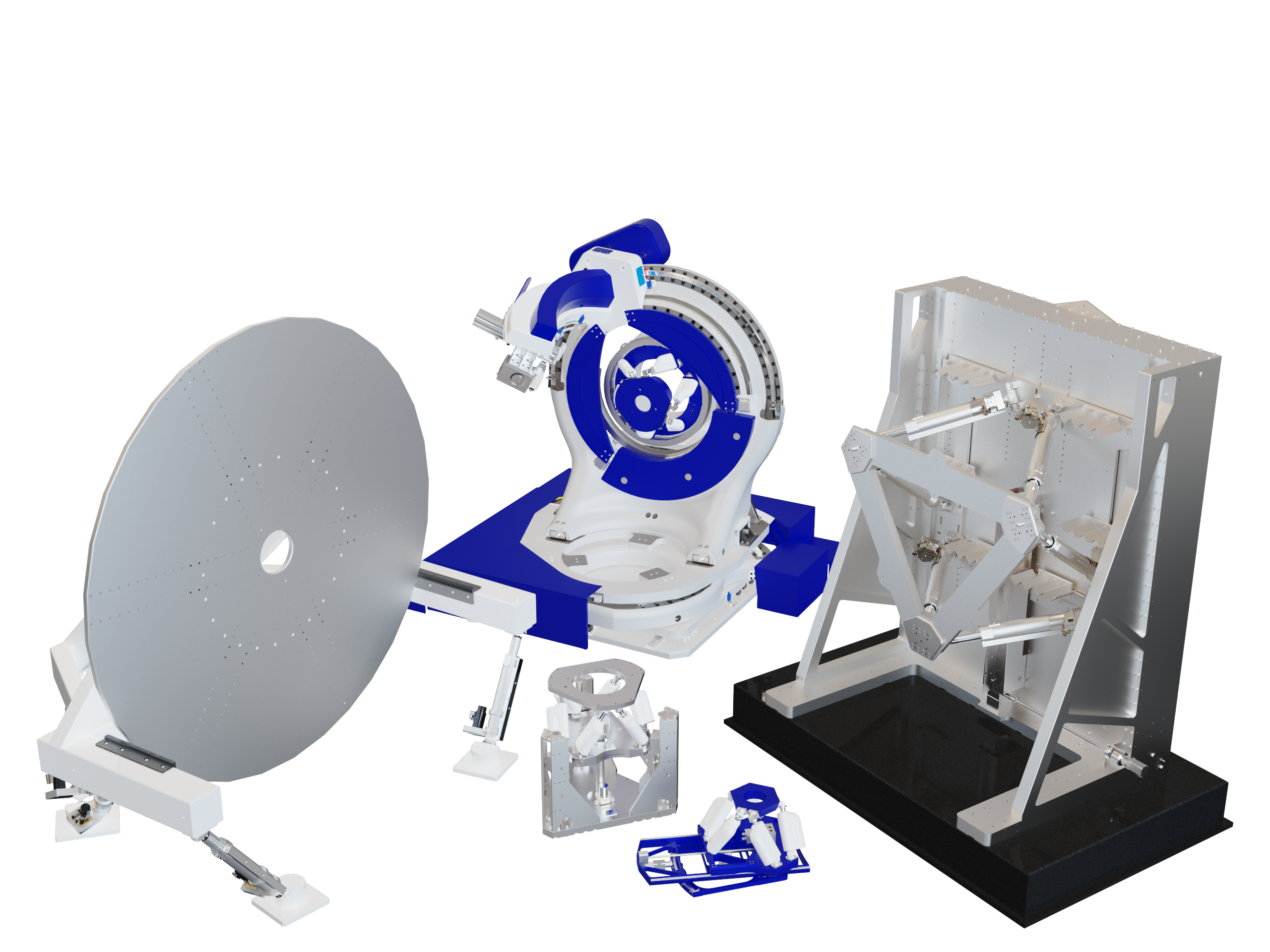
HEXAPODE & PLATINES : UNE ADAPTABILITÉ MAXIMUM

Combiner un hexapode avec des tables de translations et de rotation offre une solution complète pour les applications exigeantes nécessitant à la fois une grande course et une précision exceptionnelle.
Les tables de translation assurent les grands déplacements linéaires tandis que l’hexapode apporte la précision micrométrique et les capacités de rotation multi-axes. Cette configuration permet d’optimiser l’espace de travail tout en conservant une rigidité maximale et une répétabilité de positionnement inégalée.
Cette architecture modulaire trouve ses applications dans les secteurs de la métrologie dimensionnelle, l’alignement optique de précision, les bancs de test aérospatiaux, et tous les environnements où le positionnement 6 axes de haute précision doit s’étendre sur de grandes surfaces de travail.
Une expertise reconnue mondialement




une solution complète clé en main
Chaque hexapode Symétrie est livré avec l’ensemble des composants nécessaires à sa mise en œuvre immédiate : système mécatronique complet, contrôleur dédié et logiciel de pilotage intégré.
Hexapode
Contrôleur
Logiciel
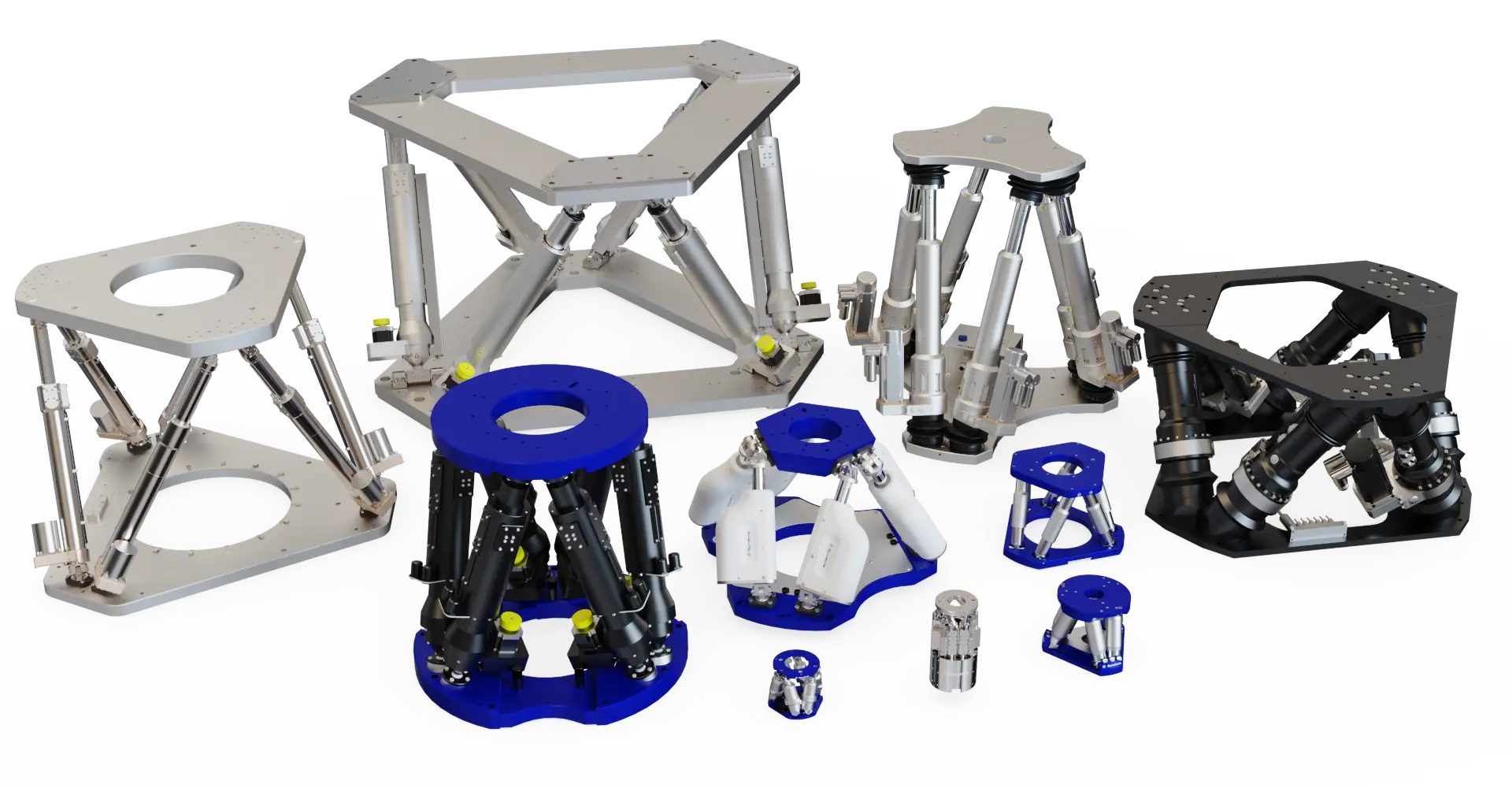
Découvrez notre gamme d’hexapodes de positionnement de précision pour des charges allant de quelques grammes à plusieurs tonnes.

Nos hexapodes de mouvement sont utilisés comme moyens d’essai dynamiques générant des trajectoires avec des vitesses d’1 m/s et des accélérations d’1 g.
De l’étude de faisabilité à la maintenance, Symétrie met à profit ses compétences en dynamique et en positionnement pour vous offrir les meilleures solutions.